Back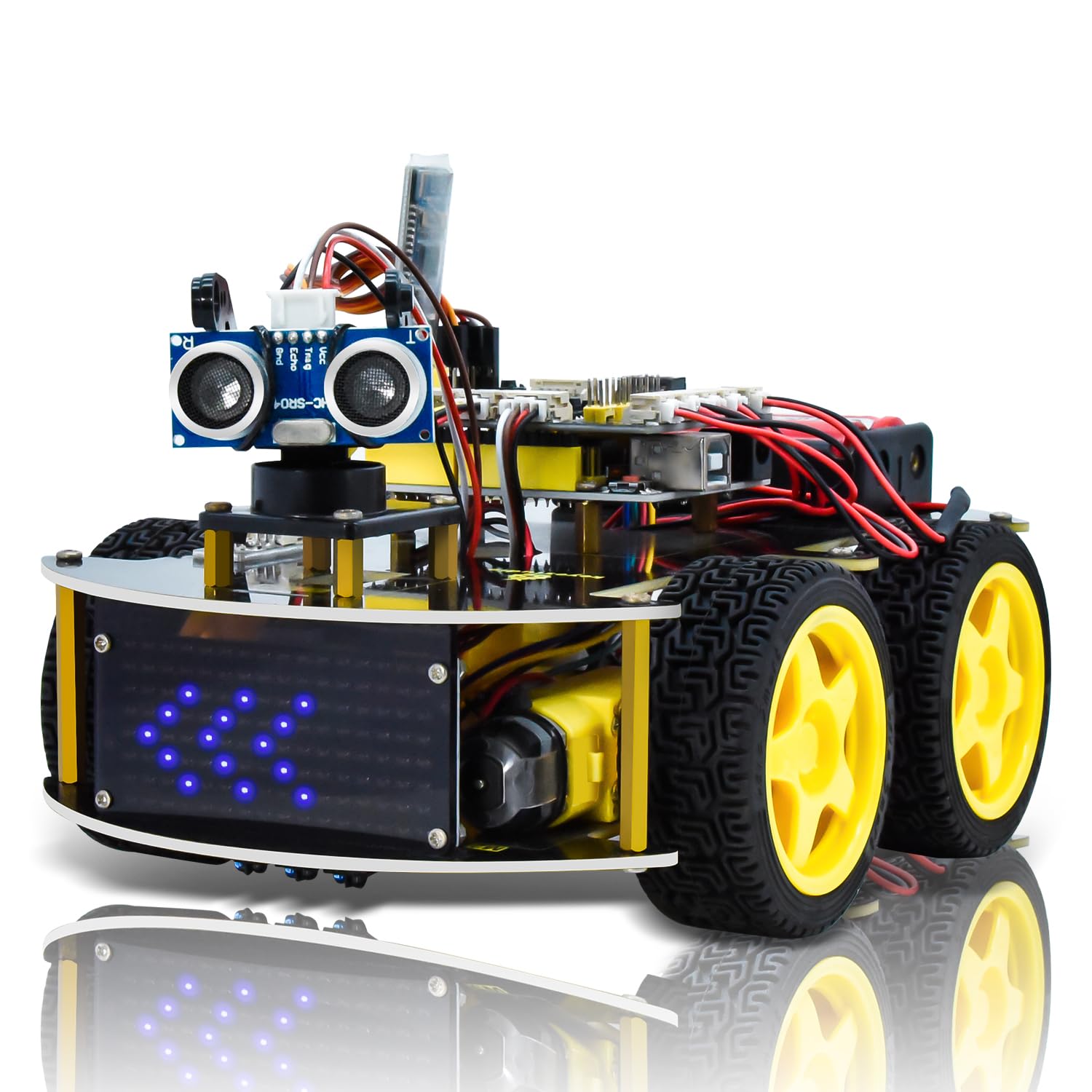
 AIAI
AIAI Sensors
Sensors Arduino
Arduino
Balancing Robot
90 Views9 Likes0 Comments12/29/2025
Build a self-balancing two-wheeled robot. Learn about PID control, gyroscopes, and real-time stabilization.
Code Examples
1 exampleMotor Control Example
Arduino35 lines
motor_control.ino
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
500 italic">// Robot Motor Control Example
500 italic">// Controls two DC motors for a robot car
500 italic">#define MOTOR_A1 5
500 italic">#define MOTOR_A2 6
500 italic">#define MOTOR_B1 9
500 italic">#define MOTOR_B2 10
void setup() {
pinMode(MOTOR_A1, OUTPUT);
pinMode(MOTOR_A2, OUTPUT);
pinMode(MOTOR_B1, OUTPUT);
pinMode(MOTOR_B2, OUTPUT);
}
void forward() {
analogWrite(MOTOR_A1, 200);
analogWrite(MOTOR_A2, 0);
analogWrite(MOTOR_B1, 200);
analogWrite(MOTOR_B2, 0);
}
void stop() {
analogWrite(MOTOR_A1, 0);
analogWrite(MOTOR_A2, 0);
analogWrite(MOTOR_B1, 0);
analogWrite(MOTOR_B2, 0);
}
void loop() {
forward();
delay(2000);
stop();
delay(1000);
}Comments (0)
Please login to leave a comment
No comments yet. Be the first to comment!
K
keyestudio Robot
Creator
More from this author
AIESP32 Chatbot with Display
Build an AI chatbot using ESP32 with OLED display. Connect to cloud AI services for intelligent conv
22250
AIArm Robot with Vision
Add computer vision to your robot arm. Detect and pick up objects based on color or shape recognitio
445420
SensorsPressure Sensor Applications
Use pressure sensors for weight measurement and touch detection. Build scales, pressure mats, or for
376410
ArduinoSerial Communication Tutorial
Master serial communication between Arduino and computer. Send and receive data for monitoring and c
470220